Yi-Shiuan Tung

1111 Engineering Dr. ECES 111
Computer Science Dept, University of Colorado
Boulder, 80309 CO, USA
I am a PhD Student at CU Boulder co-advised by Professor Alessandro Roncone and Professor Bradley Hayes. Previously, I worked with Professor Julie Shah at MIT on flexible assembly lines for human-robot collaboration. I received my Masters in Engineering and Bachelors Degree in Computer Science at MIT in 2018 and 2015 respectively.
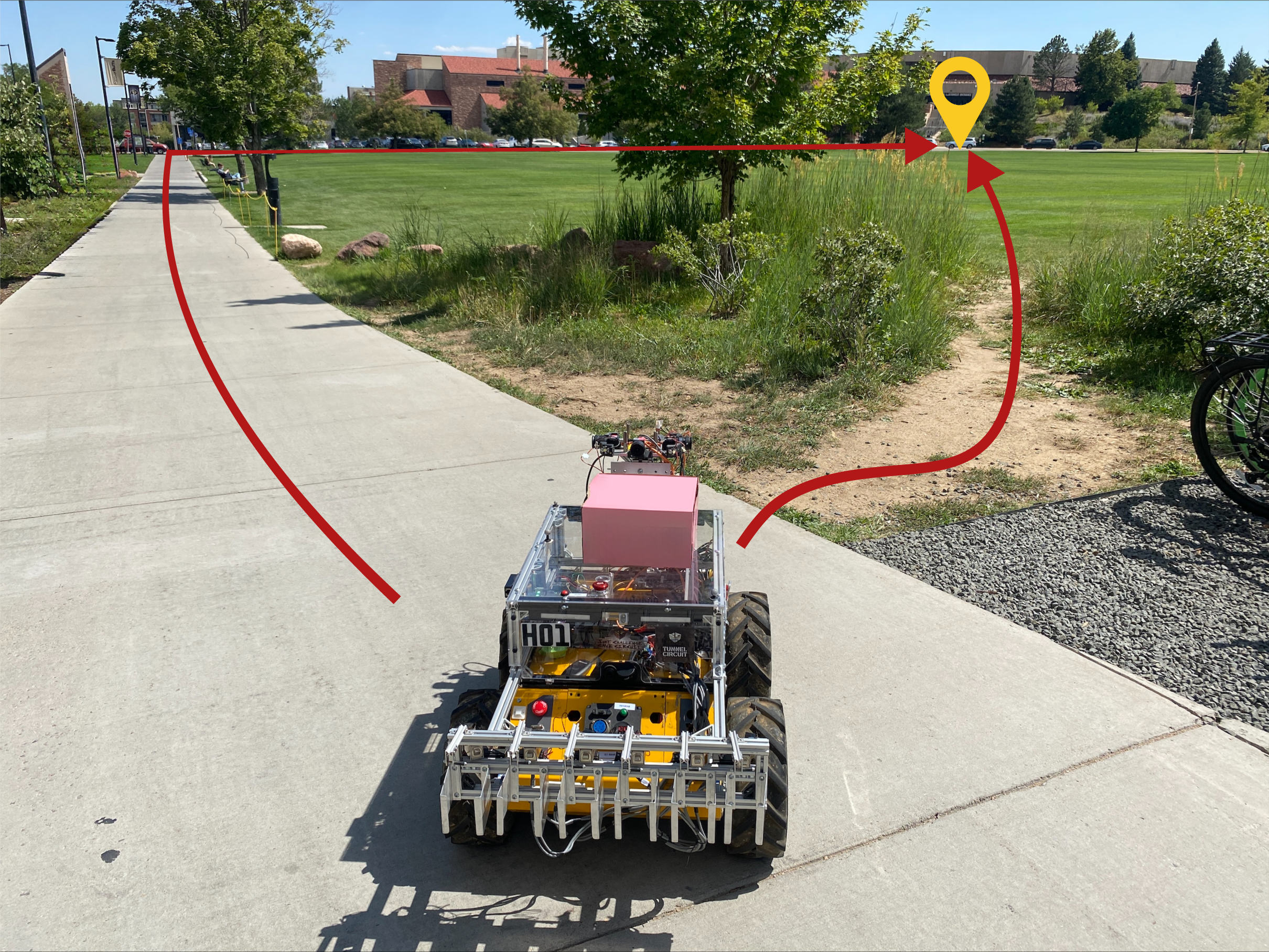
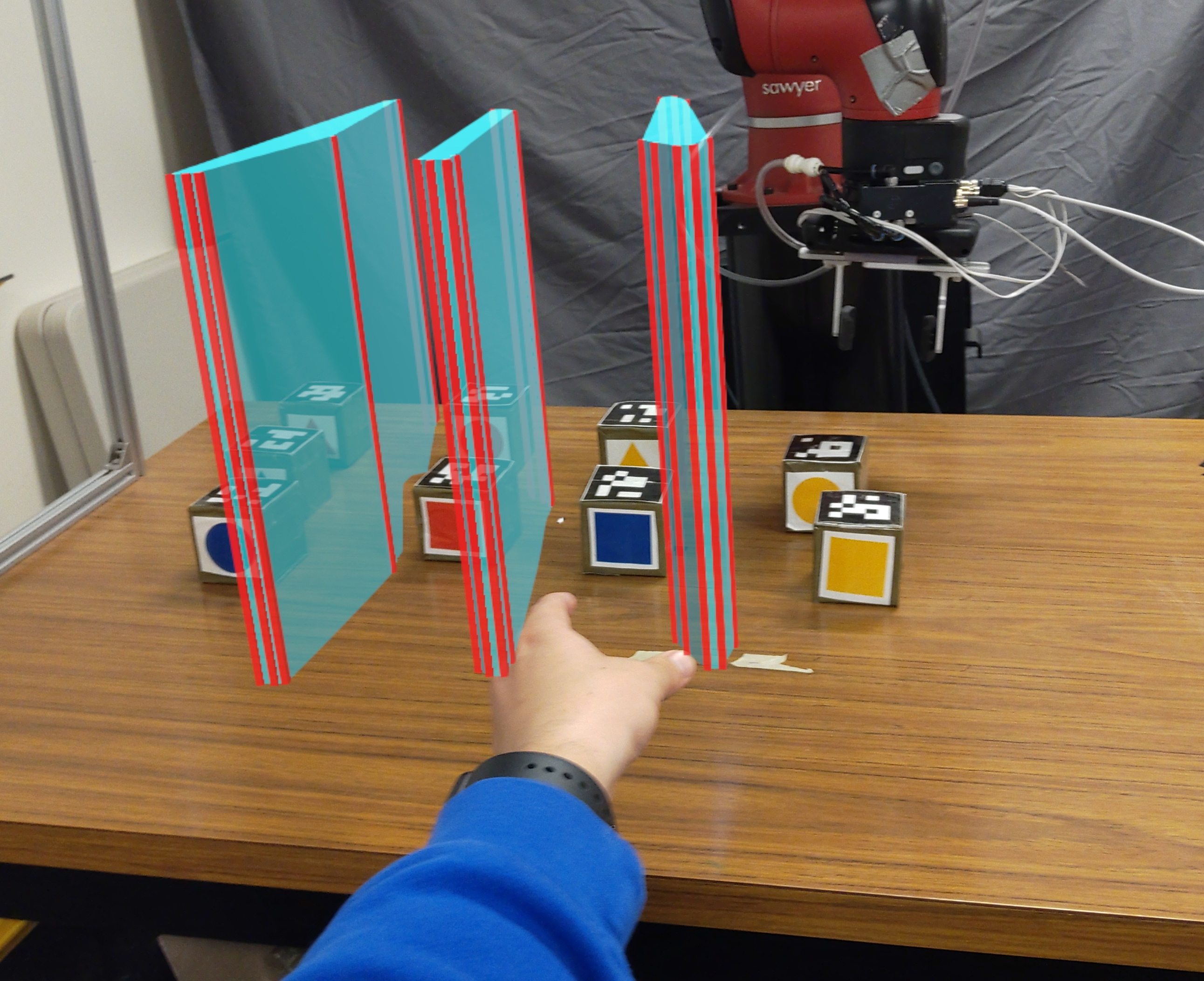
My research interests lie at the intersection of human-robot interaction, machine learning, and environment design. I develop algorithms that use environment design as a mechanism for improving intent inference, reward alignment, and fluency in human-robot collaboration. My work combines behavioral modeling (e.g., Boltzmann-rational agents, preference learning) with optimization and quality-diversity search to explore how modifying physical layouts or task structures improves alignment, trust, and shared understanding in real-world interactions. More recently, I have been exploring preference-aligned policy learning using vision-language models, diffusion-based trajectory optimization for diverse skill discovery, and shared autonomy systems that blend human teleoperation with real-time intent inference for assistive manipulation.
Outside of lab, I like to run , play tennis, and snowboard!
news
latest posts
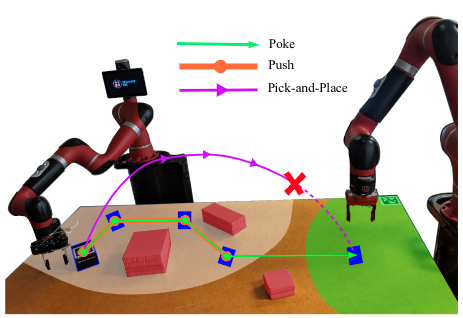
Counterfactual Reasoning and Environment Design for Active Preference Learning
Blog post for the ICRA 2026 full paper
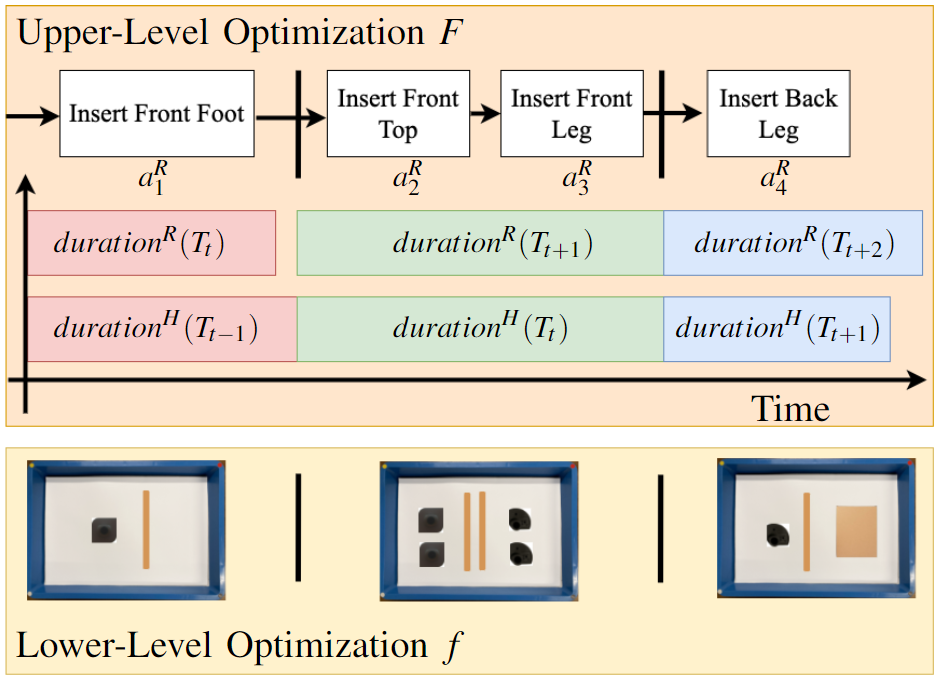
Workspace Optimization Techniques to Improve Human Motion Prediction
Blog post for HRI'24 paper